MPU6050 获取角度理论推导(一) |
您所在的位置:网站首页 › 42688陀螺仪 mpu6000 › MPU6050 获取角度理论推导(一) |
MPU6050 获取角度理论推导(一)
|
当你搜到这篇文章的时候说明你已经在做陀螺仪的项目了。 那么陀螺仪具体的东西应该不用多说,他其实就是一个获取原始数据然后通过DMP或者MCU的计算处理, 然后得到角度的一个传感器。 MPU6050内部集成了一个陀螺仪一个加速传感器还有DMP计算单元。 陀螺仪是提供实时的三轴角速度,其中三轴分辨是Pitch, Roll,Yaw。简单来说我们视之为XYZ三轴。 还有三轴加速度,加速计时用来获取三轴方向的实时加速度值。 所以三轴陀螺仪+三轴加速计 就是6轴数据的融合了。 如果再配合一个三轴的磁力计,那么就变成9轴数据融合了。 这里先和大家说一下自己的亲身体验。 9轴的陀螺仪,带有磁力计。可以维持Yaw方向不漂移。但是对磁场的要求相对较高。放到实际产品中的时候要考虑如何避免 产品中磁场的影响。这样才能保证稳定性。 6轴的陀螺仪虽然Z轴会漂,但是使用软件滤波的方法还是可以维持一段时间稳定性的。且对磁场没有要求。
接下来我们来剖析一下陀螺仪6轴和9轴的融合原理。 原文我忘记是哪里的了,地址就不贴了(找到了再补上),也是参考别人的。 姿态角解算---理论推导
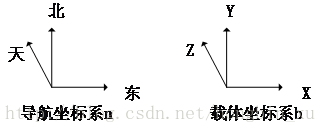
姿态航向参考系统(AHRS)。 首先我们需要了解两个坐标系: 导航坐标系(n): 导航坐标系 n 指的是以地球为参考的坐标系,定义为东北天右手直角坐标系。 载体坐标系(b): 载体坐标系 b 则是以四轴飞行器自身为参考的坐标系, 也定义为右手直角坐标系。 例如:飞机向前的方向为 Y 轴正方向,取飞机向右的方向为X轴正方向,取飞机向上的方向为Z轴正方向。
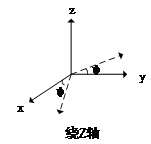
四元数、欧拉角、方向余弦: 在百度百科中,欧拉角是这样被描述的:用来确定定点转动刚体位置的3个一组独立角参量,由章动角θ、旋进角(即进动角)ψ和自转角j组成,为欧拉首先提出而得名。简单点来说,就是:绕Z轴旋转为偏航角(YAW)ψ,绕Y轴旋转为横滚角(ROLL)θ,绕X轴旋转为俯仰角(PITCH)φ。
绕Z轴旋转ψ角(YAW):
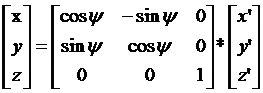
定义导航坐标系 n 中某一点的坐标为(x,y,z),使用矩阵表示为: 设该点在载体坐标系中坐标为(x’,y’,z’),使用矩阵表示为:
对于该任意点,易得到两个坐标系下坐标之间的关系:
表示成矩阵的形式如下:
同理可得: 绕Y轴旋转θ角(ROLL):
两个坐标系下的转换关系:
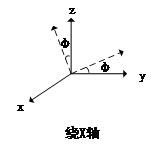
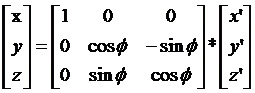
绕X轴旋转φ角(PITCH):
两个坐标系下的转换关系:
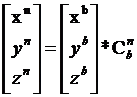
由前面的结论可以得到进过三个欧拉角的旋转,得到导航坐标系下的向量
给出由
所以可以得到用欧拉角表示的坐标变换矩阵:
这样我们就得到了使用欧拉角表示的坐标变换矩阵,这个公式先放在这里,等会再用。
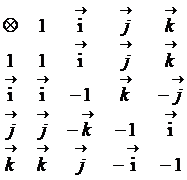
接下来我们来看看四元数: 四元数是简单的超复数。 复数是由实数加上虚数单位 i 组成,其中i^2 = -1。 相似地,四元数都是由实数加上三个虚数单位 i、j、k 组成,而且它们有如下的关系: i^2 = j^2 = k^2 = -1, i^0 = j^0 = k^0 = 1 , 每个四元数都是 1、i、j 和 k 的线性组合,即是四元数一般可表示为a + bk+ cj + di,其中a、b、c 、d是实数。 对于i、j、k本身的几何意义可以理解为一种旋转,其中i旋转代表X轴与Y轴相交平面中X轴正向向Y轴正向的旋转,j旋转代表Z轴与X轴相交平面中Z轴正向向X轴正向的旋转,k旋转代表Y轴与Z轴相交平面中Y轴正向向Z轴正向的旋转,-i、-j、-k分别代表i、j、k旋转的反向旋转。 这里已经讲得比较清楚了,我们可以把四元数看成一个常数加上一个三维矢量,即
四元数的乘法运算: 对于任意一个四元数
满足乘法关系如下:
举例:假设有两个四元数,
则这两个四元数相乘结果为:
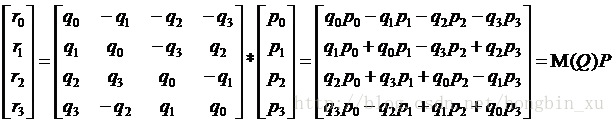
将上面的运算表示成矩阵形式: 设两个四元数Q和P的乘积为四元数
或者
从M(Q)中,第一列为四元数Q本身,第一行为四元数Q的共轭的转置,不管第一行和第一列,我们可以提取出一个3*3的矩阵VQ,称其为M(Q)的核。
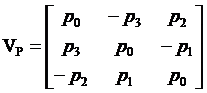
同理可得,M(P)的核VP:
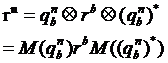
四元数的相关知识的准备差不多完成了,下面开始推导四元数的公式: 我们定义一个四元数
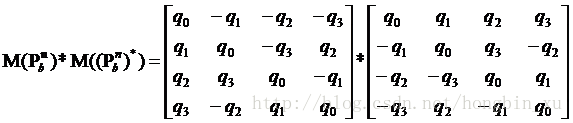
可以得到旋转矩阵
到这里我们就推出了使用四元数表示的旋转矩阵
联立两者对应项相等,求解方程组即可。解方程的步骤就省略了,直接写出结果。令:
推出结果:
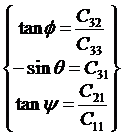
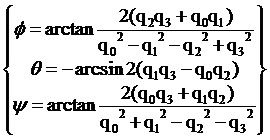
前面我们用欧拉角推导出来的旋转矩阵 这里我们代入方向余弦矩阵对应项的值求出欧拉角与四元数的关系,并做一些三角函数的变换整理得到下面的形式:
上式是欧拉角用表示四元数的公式。 还是由方向余弦矩阵(DCM)可以得到:
这四个公式的意义是,给出了四元数与欧拉角之间的关系,我们可以很方便地使用这几个公式将欧拉角与四元数相互转换。还需要注意一点,因为方向余弦矩阵的定义不同,对应的欧拉角旋转方式不同,公式也会不同。 |













【本文地址】
今日新闻 |
推荐新闻 |